












伺服電機原理與安裝
隨著工業自動化程度的不斷提高,伺服控制技術、電力電子技術和微電子技術的快速發展,伺服運動與控制技術也在不斷走向成熟,電機運動控制平臺作為一種高性能的測試方式已經被廣泛應用,人們對伺服性能的要求也在不斷提高。
一 伺服電機原理
伺服電動機又稱執行電動機,在自動控制系統中,用作執行元件,把所收到的電信號轉換成電動機軸上的角位移或角速度輸出。分為直流和交流伺服電動機兩大類。

伺服電機接收到1個脈沖,就會旋轉1個脈沖對應的角度,從而實現位移,因為,伺服電機本身具備發出脈沖的功能,所以伺服電機每旋轉一個角度,都會發出對應數量的脈沖,這樣,和伺服電機接受的脈沖形成了閉環,系統就會知道發了多少脈沖給伺服電機,同時又收了多少脈沖回來,這樣,就能夠很精確的控制電機的轉動,從而實現精確的定位。
在性能上比較,交流伺服電機要優于直流伺服電機,交流伺服電機采用正弦波控制,轉矩脈動小,容量可以比較大。直流伺服電機采用梯形波控制,相對差一些。直流伺服電機中無刷伺服電機比有刷伺服電機要性能要好。
二 環控制原理
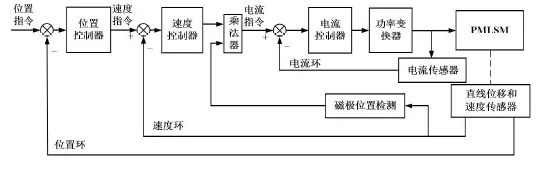
伺服電機內部的轉子是永磁鐵,驅動器控制的U/V/W三相電形成電磁場,轉子在此磁場的作用下轉動,同時電機自帶的編碼器反饋信號給驅動器,驅動器根據反饋值與目標值進行比較,調整轉子轉動的角度。無論是 有刷直流伺服電機驅動器還是無刷直流伺服電機驅動器驅動器同樣都是采用三閉環控制結構。
1、首先是電流環,此環完全在伺服驅動器內部進行,通過霍爾裝置檢測驅動器給電機的各相的輸出電流,負反饋給電流的設定進行PID調節,從而達到輸出電流盡量接近等于設定電流,電流環就是控制電機轉矩的,所以在轉矩模式下驅動器的運算最小,動態響應最快。
2、第二環是速度環,通過檢測的伺服電機編碼器的信號來進行負反饋 PID 調節,它的環內 PID 輸出直接就是電流環的設定,所以速度環控制時就包合了速皮環和電流環,換句話說任何棋式都必須使用電流環,電流環是控制的跟本,在速度和位置控制的同時系統實際也在進行電流(轉矩)的控制以達到對速度和位置的相應控制。
3、第三環是位置環,它是最外環,可認在驅動器和伺服電機編碼器間構建也可以在外部控制器和電機編碼器或最終負載間構建,要根據實際情況來定。由于位置控制環內部輸出就是速度環的設定,位置控制模式下系統進行了所有 3 個環的運算,此時的系統運算量最大,動態響應速度也最慢。
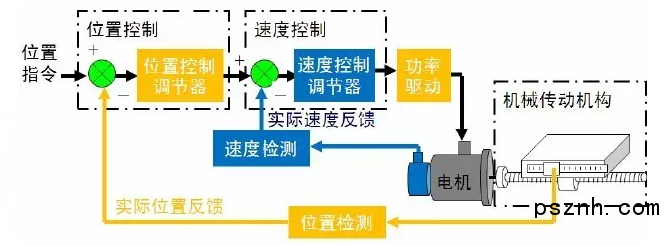
a有刷直流伺服電機驅動器:電動機的工作原理和普通的直流電機完全相同,驅動器為三閉環結構,從內到外分別為電流環、速度環、位置環。電流環的輸出控制電機的電樞電壓,電流環的輸入為速度環PID的輸出,速度環的輸入為位置環的PID輸出,位置環的輸入即是給定輸入,控制原理圖如上圖。
b無刷直流伺服電機驅動器:供電電源為直流,經過內部的三相逆變器逆變成U/V/W的交流電,供給電動機,驅動器同樣采用三閉環控制結構(電流環、速度環、位置環),驅動控制原理同上。
c交流伺服電機驅動器:大體可以劃分為功能比較獨立的功率板和控制板兩個模塊,控制板通過相應的算法輸出PWM信號,作為驅動電路的驅動信號,來改逆變器的輸出功率,以達到控制三相永磁式同步交流伺服電機的目的。
功率驅動單元首先通過三相全橋整流電路對輸入的三相電或者市電進行整流,得到相應的直流電。經過整流好的三相電或市電,再通過三相正弦PWM電壓型逆變器變頻來驅動三相永磁式同步交流伺服電機,簡單的說是AC-DC-AC的變流過程。
三 影響控制的因素
1、速度環主要進行PI(比例和積分),比例就是增益,所以我們要對速度增益和速度積分時間常數進行合適的調節才能達到理想效果。
2、位置環主要進行P(比例)調節。對此我們只要設定位置環的比例增益就好了。當進行位置模式需要調節位置環時,最好先調節速度環,位置環、速度環的參數調節沒有什么固定的數值,要根據外部負載的機械傳動連接方式、負載的運動方式、負載慣量、對速度、加速度要求以及電機本身的轉子慣量和輸出慣量等等很多條件來決定,調節的簡單方法是在根據外部負載的情況進行大體經驗的范圍內將增益參數從小往大調,積分時間常數從大往小調,以不出現震動超調的穩態值為最佳值進行設定。
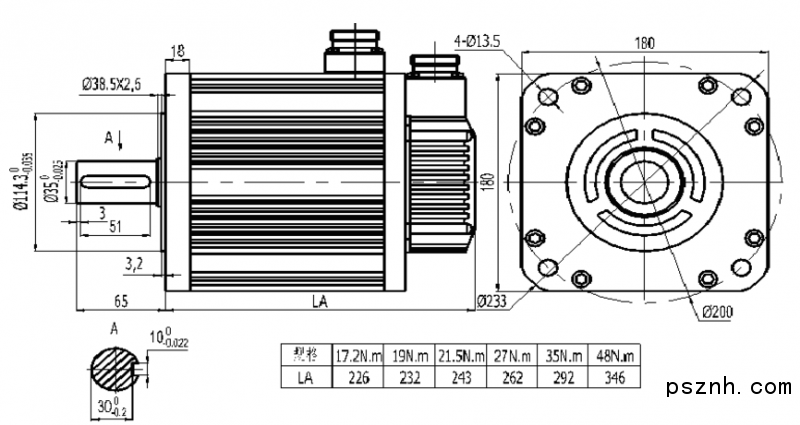
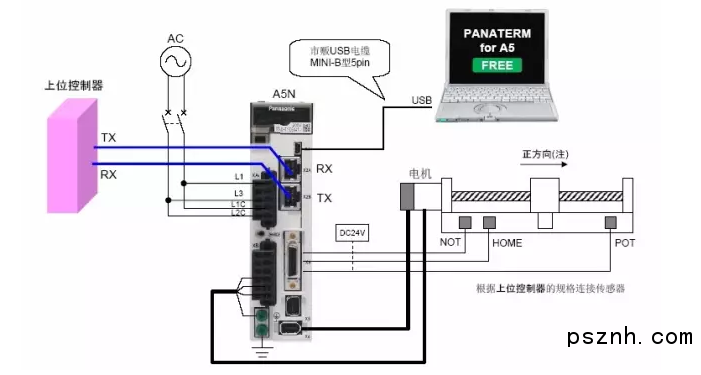
四 伺服電機接線圖

90LB伺服電機

 手機圖頁網
手機圖頁網



